
海上风电场升压站导管架及上部组块是在建造场地进行预制建造,之后通过运输船舶运输到指定海域进行安装,当建造场地距离安装海域较远且海上运输作业需要通过海况恶劣的海域时,长距离运输的安全性将显得尤为重要[1- 4]。对于升压站海上运输过程来说,实时振动监测系统是它不可缺少的一部分。但在目前的海上升压站安装施工中,实时振动监测技术还没有得到广泛运用。海上吊装、运输作业是一项高风险的工程,每一步的决策都非常重要,稍有差池可能导致巨大损失,实时监测可以使决策者对现场情况充分了解,有利于做出正确的决策。实时姿态及振动监测不但可以得到大量有价值的监测数据,还可以对驳船所运输的组块的各项指标实时监控,对随时可能发生的安全隐患进行提早预警,从而降低风险减小损失[5]。本研究以江苏滨海北H2海上升压站运输、吊装项目为例,对实时振动监测系统的设计思路进行阐述,并对监测结果进行了分析。
国家电投集团滨海北H2# 400M W海上风电项目位于滨海北部的中山河口至滨海港之间的近海海域,离岸距离22 km,海底地形变化平缓,水深15~ 18 m。风电场海上升压站距海岸线直线最近距离约21. 5 km,海底高程约为- 18. 0 m(85高程)。该工程电气系统分两部分布置,海上布置220 k V升压站,陆上布置集控中心。220 k V海上升压站将35 k V电压升压至220 k V,经220 k V海底电缆将风机所发电能输送至陆上集控中心后,就近转入电网系统。
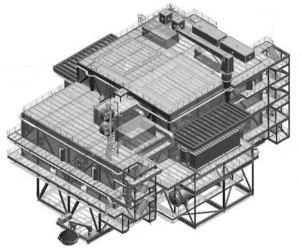
220 k V海上升压站上部组块总重约3 300 T, 共5层(图1)。该升压站在南通蓝岛海洋工程公司建造预制,由驳船“德浮15002”浮运至盐城滨海近海风电场海上场址,然后由浮吊船“新振浮7”进行安装。本次监测作业内容包括:升压站在码头吊装过程中、浮运过程中以及海上安装过程中对升压站上部组块4个桩腿及柱顶共8个位置的冲击加速度监测、倾斜监测。港口吊装、海上浮运和现场安装过程中,要求升压站4个桩腿位置的三轴振动加速度不超过0. 2 g;俯仰倾角不超过10°,横摇倾角不超过20°。
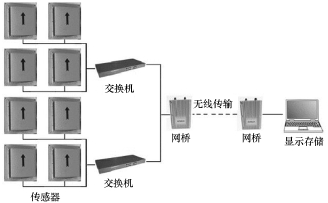
吊装、运输过程中,受风、波浪和海流的共同作用,将产生6个自由度的运动,即横摇、纵摇、艏摇、升沉、纵荡和横荡,这种运动是一种六自由度的耦合运动,船体上部的结构物将随驳船一起运动,运动惯性力将作用在组块结构上,对于组块的一些精密设备和仪表,如果处在振动环境中还可能会影响设备的灵敏度甚至造成损坏[6]。因此对振动测量提出了较高的要求,振动监测系统需要具备高可靠性、体积小、实时性好等特点。监测系统的整体设计思路为利用8组测量单元输出三轴加速度信息和角度信息,通过串口服务器,数据串口转网口输出,利用无线Mesh技术进行数据传输,上位机软件实时接收、显示并监测各个设备状态(图2)。
数据采集模块采用天津时空经纬信息技术有限公司SKJW- 01B传感器,该传感器主要由测量单元组成,每个测量单元包含3只加速度计和3只陀螺仪,以相互垂直位置进行安装。陀螺仪测得沿载体坐标系3个轴的角速度信号,加速度计测得沿载体坐标系3个轴的加速度信号。陀螺仪测得的角速度信息计算出姿态矩阵并提取姿态角,利用姿态矩阵将加速度计的测量信息变换到导航坐标系上,然后进行加速度到速度的积分以及速度到位置的积分。其主要技术指标为:水平姿态角量程±90°,动态测量精度优于0. 1°(RMS值),分辨率0. 01°;加速度测量量程为±4 g,测量误差不大于0. 05 mg (RMS值),分辨率不低于0. 02 mg(RMS值)。
SKJW- 01B传感器通过RS- 232串行接口输出数据,而RS- 232模抑制能力差,再加上双绞线上的分布电容,其传输距离最大约为15 m,而且其仅支持一对一的通信,不能满足本次长距离、多传感器同步监测的需求。通信转换模块是利用串口服务器将串口数据流解析为TCP/IP协议的数据包,从而实现数据的网络传输。该方法能够将多个串口设备连接并能将串口数据流进行选择和处理,把传统的串口数据转化为IP端口的数据,可以提高设备的利用率,简化布线。
远程设备数据传输,需要稳定可靠的数据传输技术,相比较传统的串口数据传输,基于TCP/IP的网络数据传输技术,具有传输数据量大,时间延迟小等优点[7]。无线Mesh网络是一种多跳、具有自组织和自愈特点的宽带无线网络结构,无线Mesh网络是一种由无线链路连接路由器和终端设备的静态无线网络,是一种高容量、高速率的多点对多点网络[8- 9]。升压站上部组块在港口吊装、海上浮运和现场安装过程中,其与指挥中心的距离较远,普通无线路由器及定向网桥传输数据不稳定。本系统采用北京格网通讯有限公司Air-Mesh 5800全向网桥搭建无线局域网,进行数据传输。该设备传输距离可达30 km,传输速率高达300 Mbps,具有性能可靠、兼容性强的优势。
监测软件实时接收各传感器的数据,显示并监测各个设备状态,具备超门限报警功能及数据存储功能。
显示窗口有8组测量单元的横纵摇2路数值及三向加速度3路数值的同步显示,数据刷新率为2 Hz;8组测量单元各自提供的横、纵摇2路数值及三向加速度3路数值的全部数据的时域同步显示;可查看至少5 h数据的整体时域图。时域图设置了格网及上下门限值,并提供了超限报警功能。
在软件开始接收数据前,设置X轴、Y轴和Z轴的加速度阈值为0. 2 g,横滚、俯仰的角度阈值为20°。各组测量单元姿态信息正常时以绿色形式显示,姿态信息超出阈值,软件界面上会以红色形式闪烁,并发出警报。
数据现场实时记录存储,8路测量单元的数据记录速度为2 Hz,数据可用TX T、Excel等文本处理软件阅读及处理。每个传感器单独保存一份原始数据,记录的数据含有日期时间信息。
监测作业分为3部分,升压站吊装到驳船部分、绑扎作业及海上浮运部分、现场安装部分。码头吊装过程横摇最大为1. 934°,纵摇最大为1. 362°,Ax加速度最大为0. 030 g,Ay加速度最大为0. 036 g, Az加速度最大为0. 025 g;绑扎及海上运输过程横摇最大为- 3. 647°,纵摇最大为- 1. 028°,Ax加速度最大为0. 029 g,Ay加速度最大为0. 085 g,Az加速度最大为0. 032 g;海上安装过程横摇最大为- 1. 604°,纵摇最大为- 1. 033°,Ax加速度最大为0. 024 g,Ay加速度最大为0. 031 g,Az加速度最大为0. 028 g。
整个吊装、浮运、安装过程,X方向最大倾角为- 3. 647°,Y方向最大倾角为1. 362°,X方向最大加速度为0. 030 g,Y方向最大加速度为0. 085 g,Z方向最大加速度为0. 032 g,各监测项最大值皆小于门限值。码头吊装及海上安装过程,浮吊船吊钩上装有缓冲单元,因此各项极值较小。海上浮运过程,驳船从码头向外海航道航行时,航行方向为E方向,风浪方向为偏南向,横浪向导致Roll、Ay数据变化较大。
经验模态分解(Empirical Mode Decomposition, EMD)方法是依据数据自身的时间尺度特征来进行信号分解,该方法在理论上可以应用于任何类型的信号的分解,因而在处理非平稳及非线性数据上,具有非常明显的优势,适合于分析非线性、非平稳信号序列,具有很高的信噪比。它能使复杂信号分解为有限个本征模函数(Intrinsic Mode Function, IMF),所分解出来的各IMF分量包含了原信号的不同时间尺度的局部特征信号。经验模态分解法能使非平稳数据进行平稳化处理,然后进行希尔伯特变换获得时频谱图,得到有物理意义的频率[10]。为了研究Roll和Ay的变化规律,选取驳船运输横浪期间4 h的监测数据(采样频率2 Hz)进行EMD分解。
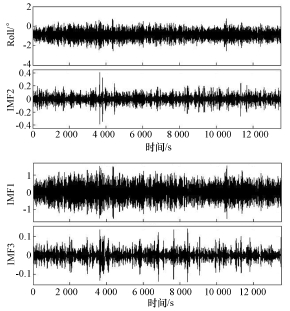
Roll值经验模态分解得到13个内在模(IMF)和一个剩余项,图3为Roll值及前3个内在模的曲线。各模态对整个波动的贡献差异明显,第一模态的方差贡献最大,介于90. 22%~- 97. 37%,平均振幅也最大,介于0. 71~ 1. 10°,频率最高,平均周期介于6. 31~ 6. 70 s。第二模态方差贡献为1. 49%~ 2. 60%,平均振幅为0. 09~ 0. 16°,平均周期为10. 58~ 11. 18 s。随着模态序号的增大,模态方差贡献变小,通常小于1%,振幅和频率也逐渐减小。第一模态的平均周期对应风浪的周期,第二模态的平均周期对应涌浪的周期,两个模态的方差贡献之和大于91%,幅值最大,说明船舶横摇主要受风浪和涌浪的影响。
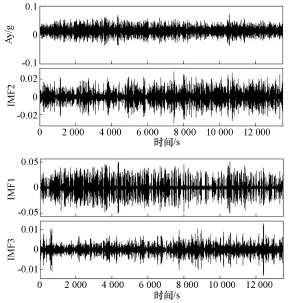
Ay值经验模态分解同样得到13个内在模(IMF)和一个剩余项,图4为Ay值及前3个内在模的曲线。第一模态的方差贡献最大,介于72. 68%~ - 79.62%,平均振幅介于0.010~ 0.012 g,平均周期介于2. 69~ 3. 10 s。第二模态方差贡献为17. 52%~ 24. 07%,平均振幅为0. 012~ 0. 014 g,平均周期为7. 27~ 7. 68 s。随着模态序号的增大,模态方差贡献、振幅和频率也逐渐减小。第一模态和第二模态的平均周期对应风浪的周期,两个模态的方差贡献和大于91%,幅值最大,说明Y方向的加速度主要受风浪的影响。
各监测点的Roll值与Ay值的相关系数在- 0. 90~- 0. 92,说明Roll与Ay具有高度相关性,两者的变化都主要受风浪的影响,Roll值要内在模态(IMF1)的平均周期约为Ay的2. 1~ 2. 4倍。
升压站海上运输振动监测系统能够达到远程振动监测及报警目的,为指挥人员决策提供有效的信息,该系统在滨海北H2升压站项目中得到成功应用,稳定可靠。从整个吊装、浮运及安装过程中来看,海上运输过程横浪航行时横摇值和Y方向加速度值变化较大,其变化主要受风浪和涌浪的影响,因此为了保证海上安全运输,在海上运输期间应尽量避免运输船舶横浪航行。

 手机扫一扫
手机扫一扫