
目前水下潜器的导航具有工作时间长、环境复杂、信息源少和隐蔽性要求高的特点[1],须综合采用卫星导航、超短基线导航和惯性组合导航,作为长周期和长距离的导航方式。捷联惯性导航系统(SINS)是不依赖于任何外部信息,也不向外部辐射能量的自主式导航系统[2],能够在任何介质和任何环境中完成水下潜器的导航工作,而且能够输出载体的位置、速度和姿态参数。然而惯导系统有其固有的缺点,即位置误差会随时间不断积累,长期工作容易失稳。多普勒计程仪(DV L)可提供较精确的载体速度信息,GPS和超短基线可在水上和水下修正惯导系统的位置,这些均可提高捷联惯导的位置精度。因此,在水下潜器的导航工作中,通常采用以惯导系统为核心,以DV L和超短基线定位系统等传感设备为辅助的组合导航定位系统。
PHINS是iXBlue公司生产的高性能捷联式光纤陀螺惯性导航系统,安装了水下潜器专用的卡尔曼滤波器,还可方便地与GPS、DV L、深度计和回声定位系统(USBL或LBL)相连。在没有外部传感器的情况下,PHINS可达到0. 6 n mile/h的位置精度,而在有DVL辅助的情况下,PHINS的位置精度可提高到行程的0. 1%。目前PHINS已被广泛应用于水下、海上、陆地和航空领域,是高性能、低成本惯导系统的代表。本研究以PHINS为例,对惯性导航系统的安装和初始对准技术进行分析。
PHINS可安装在船体的任何位置,PHINS单元也能够固定在任何位置和方向。相应地,PHINS相对于船体坐标系的角度方向(偏差)以及相对于监测点和其他传感器的位置(力臂)须计算并输入PHINS系统。PHINS通过其搭配并运行的嵌入式数字信号处理器,将其本身的姿态和速度信息转换为监测点的姿态和速度信息。偏差和力臂的错误设置将对PHINS的精度带来不可忽视的影响,引起惯导系统的迅速发散[3]。
PHINS与船体的偏差有粗偏差和细偏差2个类型,这2种偏差在安装时就已决定。当偏差设置错误时,无论船体有无角运动,都会对导航参数产生相当大的影响,这种影响是不容忽视的。尤其在船体有角运动时,由偏差设置错误引起的导航参数误差要比没有角运动时的误差大至少1个数量级,且导航参数的误差会随航行时间的增加越来越大。与力臂设置错误相比,偏差设置错误引起的导航参数误差更加发挥决定性作用[4]。因此,偏差的精确测定对提高导航精度有重要意义。
PHINS坐标系的方向不同于船体坐标系,粗偏差是将PHINS原本的坐标系转换成与船体坐标系大致平行的坐标系而引入设置的。
通过设置粗偏差,将PHINS的(X 1,X 2,X 3)坐标系转换到PHINS的(X’1,X’2,X’3)坐标系,且转换后坐标系的方向与船体相对坐标系的方向大致平行。粗偏差通过参考PHINS的6个面和船的轴向赋值,如图1所示。

细偏差用来描述PHINS与船体的剩余偏差,主要包括misRoll、misPitch和mis Heading。
偏差角度可在PHINS被固定到船体后用不同的方法测量。其中,测量的顺序很重要,因为旋转变换是由3个面分别围绕互相垂直的轴旋转而产生的,且该轴不可互换。测量的顺序不正确将引起不正确的误差补偿,除非误差很小(小于1°)。PHINS细偏差misRoll、misPitch和mis Heading的计算方法分别为没有误差补偿的PHINS的相关值减去船体的相关值(图2)。

船体的主监测点通常是船体的重心或需要测量姿态和位置的点。为使PHINS计算主监测点的运动和位置,需设置从PHINS(中心)到主监测点的距离向量,即主要力臂(图3)。
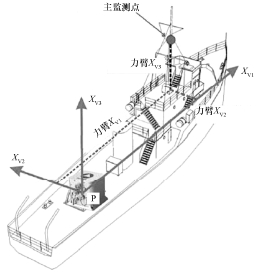
当PHINS到主监测点的力臂设置不正确时,虽然PHINS的工作不会受到影响,但由于PHINS实时解算出的监测点和主监测点间存在切向加速度和向心加速度,在船体有角运动的情况下,主监测点的实际加速度与PHINS解算出的加速度会产生额外的误差,并体现在速度误差中,从而引起各种导航参数误差。因此,力臂设置应足够精确。
测量力臂的参考点是PHINS单元的测量中心。在实际测量时,可测量主监测点与PHINS上任何参考点之间的距离,参考点可是PHINS上的标准点或4个用于固定的螺栓孔。测量应在3个轴向进行,而后参照PHINS尺寸图计算主监测点与PHINS测量中心之间的距离。
此外,PHINS还可额外设置最多3个辅助监测点,同理,需设置PHINS到所选监测点的距离向量,即辅助力臂。
为将外部传感器返回的数据准确融合,须知每个外部传感器相对于PHINS的位置,即外部传感器的力臂。需测量每个与PHINS相连的外部传感器的力臂,并输入PHINS。
测量力臂的参考点是PHINS单元的测量中心,每个传感器的参考点为传感器的可视部分(如GPS接收器的天线)。力臂在船体(X V1,X V2,X V3)坐标系中测量,测量方法与船体力臂相同。其中, GPS、USBL、LBL和深度传感器等力臂的精度应小于10 cm,DV L力臂的精度应小于5 cm。
此外,如将PHINS与DV L结合使用,DV L传感器在用于导航辅助以优化性能前须相对于PHINS进行对准。在对准后,除非PHINS与DV L传感器的配置发生变化(如DVL传感器的力臂配置和水声补偿配置),不应再次执行对准。
PHINS接收DV L的速度输入须对PHINS坐标系与DV L坐标系(X S1,X S2,X S3)之间的偏差进行补偿。通过3个欧拉角即R s、P s和H s测量DV L传感器到PHINS的偏差,这些角度定义了PHINS 与DVL传感器参考系之间的旋转变换。除设置特定的几何配置,R s和P s接近于0。只要R s和P s小于5°,其值就可保持为默认值0;对于大于5°的R s 和P s,应将其输入PHINS,然后执行DV L自动对准程序。
在执行自动对准程序时,PHINS自动计算航向偏差角度H s,具体过程为:①将DV L传感器拒绝过滤器模式设置为“始终为假”,使DV L数据不会进入卡尔曼滤波器,而仅用于对准算法;②使用GPS进行PHINS对准,航行“阶梯形”轨迹,当航向标准差稳定在0. 1°以下时,可实现精确对准;③对准后进入航位推算模式,直行2 km(GPS 1~ 5 m精度)至5 km(GPS 10 m精度),通过比较用GPS辅助计算的位置和根据DV L传感器输入的数据推算的位置,PHINS估计DVL传感器的航向偏差和比例因子,航向偏差估计的精度为GPS精度/航行距离;④在对准期间,PHINS实时更新航向偏差和比例因子,当参数稳定时(H s的变化小于±0. 05°),可停止对准。
PHINS进行导航的前提条件是完成初始对准。初始对准为PHINS提供数学平台最初的空间指向,进而通过加速度计和光纤陀螺的测量值对数学平台实时更新。按照PHINS不同的运动状态,可分为静态对准、扰动对准和动态对准。对准的精确性和快速性是衡量初始对准性能的主要指标[5]。
在PHINS上电后的第1个5 min内,自动进行粗对准,计算得到Heading、Pitch和Roll的角度值。粗对准可在海上进行,也可在PHINS静态时进行。在海上对准时,系统最好尽可能地保持稳定:允许在某个平均位置附近振荡,但应避免加速度,船体漂浮5 min会得到合适的粗对准。在对准期间,PHINS不做位置、速度和误差估计,直接使用来自传感器的数据。对准过程的信息在软件的系统状态栏和事件查看器中显示,头偏角和海拔用无效标记。
在完成粗对准后,PHINS已准备好导航,卡尔曼滤波器开始以最佳的精度估算位置和速度, PHINS进入精对准阶段以改善Heading、Pitch和Roll角度值的精度,精度改善在任务的初始阶段十分有用。在对准过程中,任何运动都是允许的,甚至建议旋转90°以便卡尔曼滤波器评估传感器在不同方向的偏差。对准过程的信息在软件的系统状态栏和事件查看器中显示。当头偏角的协方差小于0. 1°时,精对准自动结束。
海上精对准的过程需要船体运动,还需要外部传感器的有效数据(GPS或DV L),PHINS使用惯性传感器和外部传感器计算最佳的位置、速度、海拔和头偏角。当以最佳轨迹航行时,PHINS卡尔曼滤波器的估计误差将减少。实现最快精对准的最佳轨迹是“阶梯形”,每个阶梯需要3~ 5 min,允许卡尔曼滤波器评估系统所有的误差来源并将其修正,从而在精对准过程结束时达到最佳表现。
如果PHINS在实验室内进行调试,也可进行精对准。在静态情况下,PHINS完成精对准也需要输入位置和速度,可通过3个选项完成:①将GPS传感器连接到PHINS,GPS为PHINS提供有效数据,并须设置为“Always True”模式;②使用软件模拟器输入伪造的GPS数据,输入的数据应保持不变,且与系统的真实位置相同;③没有任何外部输入,而是通过设置PHINS的计算模式为“0速度更新”,手动输入PHINS的位置,不再考虑来自外部传感器的数据。
完成设置后,PHINS在精对准时需沿不同方向旋转90°,每次旋转的时间间隔约为8~ 10 min。推荐的步骤是:将PHINS静置10 min,在1~ 2 min内顺时针旋转90°,保持PHINS静止超过10 min, 将PHINS在1~ 2 min内逆时针旋转90°,回到初始位置。当头偏角的协方差稳定地小于0. 1°时,精对准自动结束。在精对准时,软件的状态面将显示“Fine alignment”标志。
水下潜器通常采用捷联惯导和多普勒计程仪组合导航系统,其中捷联惯导系统的安装误差和初始对准精度对于其导航精度具有决定性的影响。本研究以iXBlue公司的高性能惯导PHINS为例,介绍捷联惯导系统以及不同外部传感器的安装方式,重点分析PHINS与DVL之间的对准方法,并说明不同状态下捷联惯导系统的初始对准方法,从而实现PHINS预期的导航精度,在实际工程应用中具有参考价值。

 手机扫一扫
手机扫一扫