
海岸带是海洋与陆地之间的地带,其生态环境和地质结构较为复杂和特殊,既受海洋洋流系统的影响又受陆地因素的影响,是自然和社会共同作用的结果,海岸带开发利用信息研究是及时掌握海岸带资源变化的重要手段。随着沿海地区经济和各类建设工程的快速发展,海岸带开发利用信息发生了剧烈的变化。因此需要快速、高效地获取海岸带信息,并实时监测海岸带动态变化,为海洋科学管理、海洋经济发展、海洋环境保护提供基础数据和技术支撑。本研究利用地理信息系统和遥感技术,以无人机微型合成孔径雷达(Mini-SAR)影像及无人机光学正射影像为数据源,分析了海南省海花岛周边海域内海岸带开发利用信息分布状况和其变化原因。MiniSAR影像可以在恶劣天气情况下记录信息并具有极高的穿透力;与传统方法相比,遥感监测可以大大地节省投入的费用[1],而无人机正射影像数据具有高分辨率和高辨识度,在信息提取方面更优,将两种数据结合对比研究,为海岸带精细化管理提供监测手段,将具有更高的经济效益和社会效益。
本研究选取海南省儋州市海花岛周边海域的海岸带作为研究区域,该区域位于海南省儋州市排浦港与洋浦港之间的海湾区域,南起排浦镇,北至白马井镇,区域内海花岛为填海形成的人工岛,周边海域的海岸带内房屋、道路、树木、河道、农田等开发利用类型较多,具有典型代表性。
合成孔径雷达(Synthetic Aperture Radar, SAR)主要用于在全天时、全天候条件下针对目标区域获取雷达图像,并具备一定的穿透和揭露伪装能力,已经被广泛应用于测绘地形图[2]、海洋学研究[3]、冰川研究[4]、灾害监测、资源勘探、环境监测[5]等众多领域,同时SAR也是预报强台风的重要手段之一[6]。小型SAR通过发射和接收微波信号实现对地物的探测,安装在无人机上用于地理信息获取。本研究中采用基于运动补偿的机载MiniSAR高分数据。
MiniSAR的工作模式有多种,如聚束式、扫描式、条带式等。在条带式的工作模式下,MiniSAR的载机沿直线匀速运动,其天线波束指向相对于速度方向不发生改变,随着载机的飞行,波束扫过的区域为条带状。合成孔径雷达的基本目的是获得目标的图像,这就要求合成孔径雷达能够准确地重构目标的后向散射系数特性。设机载MiniSAR以速度V沿X轴(方位向)飞行,雷达以一定的脉冲重复频率(PRF)向地面发射脉冲信号,当脉冲信号到达地面上的点目标就会被反射。回波经过一定时延被雷达接收到,然后雷达从回波信号中提取目标信息,获取目标的后向散射系数,图1是其空间几何模型。图1中许多斜线标志的区域为波束随着飞机的匀速运动而照射到的条带状区域,这一区域被称为测绘带[7]。
其中:W r为测绘带宽度;R c为点目标到雷达运动轨迹的垂直距离;R为目标到合成孔径中心的距离;θ为天线指向与飞行轨迹垂直线的夹角(即斜视角)。
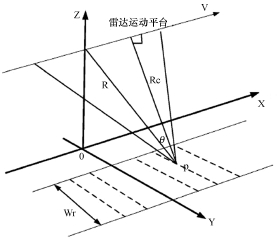
在MiniSAR成像的过程中,雷达运动平台以速度V做匀速直线运动,我们将垂直距离线与载机运动轨迹所构成的平面为坐标平面,载机运动的方向为方位向,测绘带中跟飞机载体航线垂直的方向为距离向。雷达在运动的同时,不间断地以固定的脉冲重复频率发射并且接收信号。随着飞行载体的移动,雷达波束会在地面上形成一个条带状区域,就是合成孔径雷达的成像范围。因为雷达和目标之间存在着相对运动,雷达接收到的目标回波信号中会包含一些多普勒信息;与雷达具有不同方位向而相同距离向的点目标,由于其与雷达的空间几何关系不同,它们的回波信号中所包含的多普勒信息也会有所不同,对雷达接收到的回波进行相干处理就可以获得地面目标区域的图像[7]。
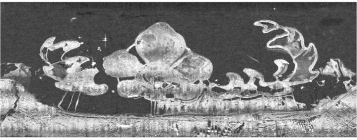
MiniSAR数据处理采用专用自动化处理软件,导入待处理数据,设置处理参数,其中MOCO项为运动补偿,参数设置区域及勾选项根据任务要求及处理时的需求填写勾选,以得到最佳图像。由于雷达分辨率较高,因此在成像时必须对数据做运动补偿。运动补偿方法分为两种,一种是基于运动传感器的运动补偿;另一种是基于数据的运动补偿(包括杂波锁定与自聚焦),本研究处理算法两者结合使用。利用软件对图像进行处理,处理软件具有自动拼接功能,可得出所有航线数据的处理结果,对处理结果进行拼接处理(图2)。
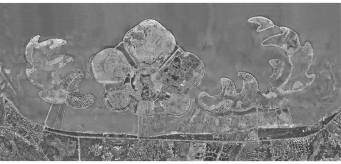
本研究使用的是固定翼无人机2015年12月获取的海花岛周边海域的航拍光学正射影像,并参照《低空数字航空摄影规范》和《航空摄影成果质量评定》对外业航拍数据进行内业检查,无人机航拍数据具有高分辨率、高清晰度、高辨识度等特点,应用范围较广。
无人机可见光数据处理。首先进行基础数据的处理,对外业飞行数据进行整理和质量检查,利用PIX4D M APPER软件进行数据处理,自动、快速地进行像控点加密、空三平差、特征点匹配、数据拼接等操作,生成正射影像图(图3)。
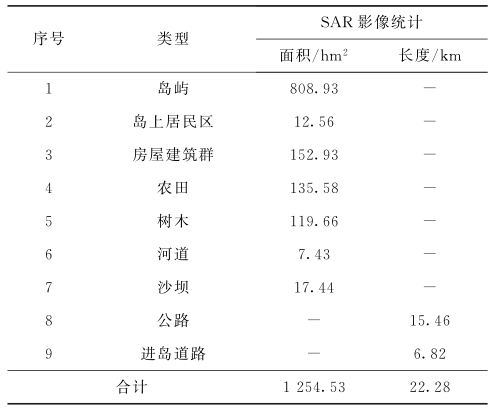
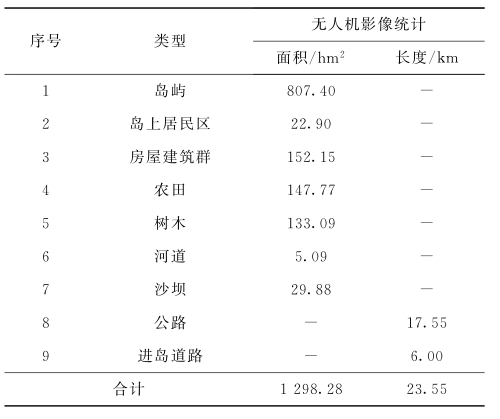
基于2015年12月的MiniSA R影像提取出海花岛周边海域开发利用类型包括岛上居民区、房屋建筑群、农田、河道、树木、公路、进岛道路和船只等,具体统计结果如表1所示。
基于2015年12月无人机光学正射影像提取出海花岛的开发利用类型与同期基于MiniSAR影像的结果类型相同,包括房屋建筑群、岛上居民区、农田、河道、沙坝、树木、公路、进岛道路和船只等,具体统计结果如表2所示。
根据不同开发利用类型在遥感影像中的光谱、纹理等特征的不同,建立了海南海花岛主要开发利用类型的遥感解译标志,采用人-机交互的方法,提取了基于MiniSAR影像和无人机光学正射影像的开发利用信息,主要有房屋建筑群、农田、岛上居民区、河道、树木、公路、进岛道路等。在GIS软件的辅助下,统计分析了海岸带各类型开发利用信息的面积和长度变化情况(图4)。
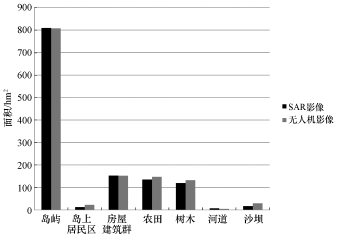
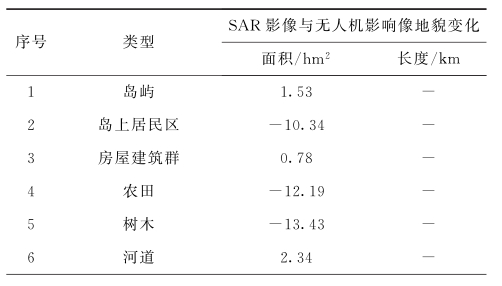
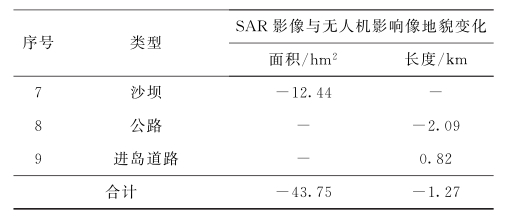
由图4可以发现,基于MiniSAR影像提取的开发利用类型相对基于无人机光学正射影像提取的开发利用类型一致。两种影像时相相同,提取的岛屿、房屋建筑群面积大致相同,相差较小。岛上居民区、农田、树木和沙坝都是基于同一时期的无人机影像,提取的面积较MiniSAR影像的大一些,主要原因是光学正射影像的色彩更丰富,地物信息识别更容易判读,因此提取的信息更准确,结果更精确,面积也更大一些;而河道、岛屿则是基于MiniSAR影像提取的面积较无人机可见光影像的更大一点,主要是由于MiniSAR具有很强的穿透力,对水陆边界区域更敏感更清晰,结果也相对更精确。各类开发利用信息具体对比变化如表3所示。
本研究基于GIS和RS技术,以MiniSAR和无人机航拍影像为数据源,提取海花岛开发利用信息,并分析提取信息的分布状况及面积变化情况,结论如下。
(1)本研究结合影像的色彩、纹理、地物光谱反射特征以及地物间的邻接关系建立解译标志,根据解译标志以及提取原则将海岸带开发利用类型分为岛上居民区、房屋建筑群、农田、河道、树木、公路、进岛道路和船只等。
(2)由于MiniSAR影像的穿透力较强并且对于云雨雪等恶劣天气的抵抗性较好,对水陆边界的信息提取和有雾有云等天气不好的情况下的信息监测优势要强于可见光影像。但无人机航拍的可见光数据成像是彩色图像,对于海岸带地物的类型识别更有优势。因此在信息提取的时候可将二者结合,以确保信息提取的精度。
(3)由于信息提取主要靠人-机交互目视解译,受制于人工经验的限制,使得提取的结果存在着一定的误差,因此在未来的研究中可进一步探讨计算机自动化分类解译的方法。

 手机扫一扫
手机扫一扫